


一、域控制器产业链机遇
域控制器(DCU,DomainControlUnit)的概念最早是由以博世、大陆为首的Tier1提出,它的出现是为了解决信息安全,以及ECU瓶颈的问题。域控制器因为有强大的硬件计算能力与丰富的软件接口支持,使得更多核心功能模块集中于域控制器内,系统功能集成度大大提高,这样对于功能的感知与执行的硬件要求降低。加之数据交互的接口标准化,会让这些零部件变成标准零件,从而降低这部分零部件开发/制造成本。也就是说,外围零件只关注本身基本功能,而中央域控制器关注系统级功能实现。
由于要完成大量运算,域控制器一般都要配备一个运算力强大的核心处理器,能够提供对智能座舱和不同级别自动驾驶算力的支持,业内有NVIDIA、英飞凌、瑞萨、TI、NXP、Mobileye等多个方案。利用处理能力强大的多核CPU/GPU芯片相对集中的去控制每个域,以取代以前的分布式汽车电子电气架构(EEA)。
随着汽车E/E架构的演变进化,主机厂和汽车电子供应商的供应关系正发生深刻变革。由于汽车电子硬件走向集中化的趋势,汽车电子供应商数量将减少,同时域控制器供应商将更加重要。
纵观整个域控制器产业,近两年中国企业的崛起是一大特色,譬如德赛西威、百度、东软、海高汽车、布谷鸟、环宇智行、知行科技等。目前这些国内域控制器研发企业的客户主要是新兴造车企业和非一线传统车企。
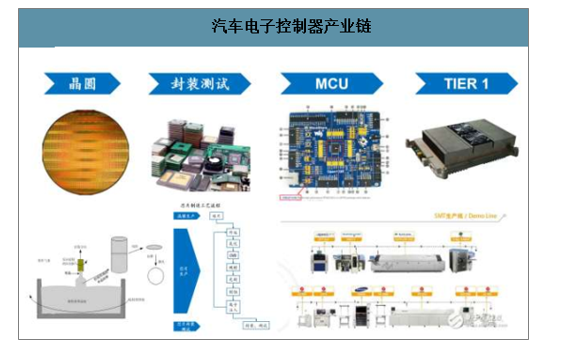
从生产流程来看,汽车电子控制器产业链主要经历了:晶圆生产、(芯片)封装测试及系统应用(MCU及各类控制器等)。上游核心产品芯片,决定了域控制器的核心计算能力,芯片设计层面主要由海外垄断,晶圆代工和封装测试层面大部分国产化半导体龙头企业具备实力;中游核心产品MCU(海外为主),PCB板(国产化率较高)、无源器件(一定程度国产化);下游控制器总成厂商主要是全球零部件巨头企业领先,近年来国内部分上市公司和初创企业逐渐实现了产品研发和订单斩获。
域控制器硬件拆解
域控制器(DCU)的底层硬件仍然是汽车电子控制单元(即ECU),只是相较于ECU而言,DCU的处理器算力更强、接口数目更多,软件方法更新。但DCU和ECU外观相似,硬件结构基本一致。
ECU和DCU硬件结构大同小异。如果拆解ECU和DCU后会发现,二者都是由印刷电路板、密封性金属外壳、支架、散热组件(风冷或水冷)等构成。大部分ECU电路结构大同小异,控制功能的变化主要依赖于软件及输入输出模块的变化,随控制系统完成任务的不同而存在差异。
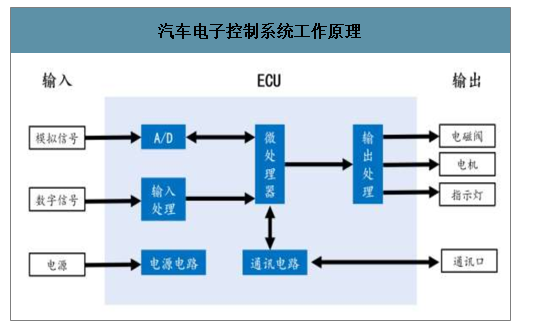
汽车电子控制系统主要包括传感器-ECU-执行器。汽车电子控制系统包括硬件和软件两部分,硬件有电子控制单元(ECU)及其接口、传感器、执行机构、显示机构等;软件存储在ECU中支配电子控制系统完成实时测控功能。
汽车电子控制系统工作原理
数据来源:公开资料整理
汽车电子控制系统工作原理:输入-转换-处理-输出。
在输入处理电路中,ECU的输入信号主要有三种形式,模拟信号、数字信号(包括开关信号)、脉冲信号。模拟信号通过A/D转换为数字信号提供给微处理器。控制系统要求模数信号转换具有较高的分辨率和精度(>10位)。为了保证测控系统的实时性,采样间隔一般要求小于4ms。数字信号需要通过电平转换,得到计算机接受的信号。对超过电源电压、电压在正负之间变化、带有较高的振荡或噪声、带有波动电压等输入信号,输入电路也对其进行转换处理。
在微处理器中,首先完成传感器信号的A/D转换、周期脉冲信号测量和其它有关汽车行驶状态信号的输入处理,然后计算并控制所需的输出值,按要求适时地向执行机构发送控制信号。过去微处理器多数是8位和l6位的,也有少数采用32位的。现在多用16位和32位机。
在输出电路中,微处理器输出的信号往往用作控制电磁阀、指示灯、步进电机等执行件。微处理器输出信号功率小,使用+5v的电压,汽车上执行机构的电源大多数是蓄电池,需要将微处理器的控制信号通过输出处理电路处理后再驱动执行机构。在电源电路中,传统车的ECU一般带有电池和内置电源电路,以保证微处理器及其接口电路工作在+5v的电压下。即使在发动机启动工况等使汽车蓄电池电压有较大波动时,也能提供+5v的稳定电压,从而保证系统的正常工作,而电动汽车一般由蓄电池供电。
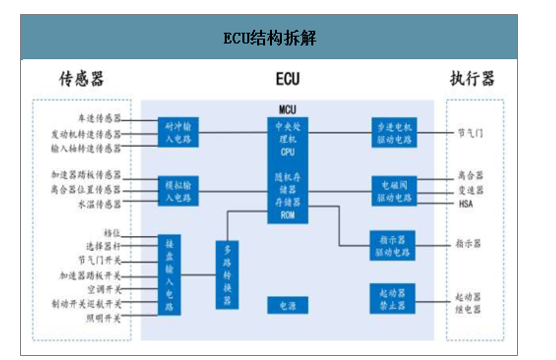
ECU就是由MCU和外围电路组成。ECU作为汽车电子控制系统的核心部分,是嵌入式系统装置,一般由中央处理机(CPU),存储器(扩展内存),扩展IO口,CAN/LIN总线收发控制器,A/DD/A转换口(有时集成在CPU中),PWM脉宽调制,PID控制,电压控制,看门狗,散热片,和其他一些电子元器件组成,特定功能的ECU还带有诸如红外线收发器、传感器、DSP数字信号处理器,脉冲发生器,脉冲分配器,电机驱动单元,放大单元,强弱电隔离等元器件。
整块电路板设计安装与一个铝质盒内,通过卡扣或者螺钉方便安装于车身钣金上。ECU一般采用通用且功能集成,开发容易的CPU;软件一般用C语言来编写,并且提供了丰富的驱动程序库和函数库,有编程器,仿真器,仿真软件,还有用于calibration的软件。
简单来说,ECU就是由微控制器(MCU)和外围电路组成。微控制器-MCU(MicroControllerUnit),又称单片机(单片微型计算机),就是在一块芯片上集成了中央处理机(CPU),存储器(ROM)和输入/输出接口的单元。ECU的主要部分是MCU,而核心部件是CPU。
ECU结构拆解
数据来源:公开资料整理
二、域控制器产业链梳理
1)硬件部分,汽车电子控制器硬件的核心在于微控制器(MCU)。MCU=CPU+存储+接口单元,CPU即芯片的一种类别。
从生产流程来看,汽车电子控制器产业链主要经历了:晶圆生产、(芯片)封装测试及系统应用(MCU及各类控制器等)。晶圆的原始材料是硅,通过纯化、融解、注入籽晶、拉出成单晶硅晶棒、硅晶棒再经过切段,滚磨,切片,倒角,抛光,激光刻,包装后,即成为积体电路工厂的基本原料——硅晶圆片,即晶圆,也就是芯片制作的原料;芯片厂收到晶圆后,通过使用化学、电路光刻制版技术,将晶体管蚀刻到硅晶圆之上,蚀刻完成后将单个的芯片一块块地从晶圆上切割下来,并进行封装测试,这一步芯片制作完成;将发去下游的控制器制造厂SMT产线上,进行PCBA(印刷电路板)。将需要的各种芯片贴装到电路板上,最后进行Housing(外壳组装)
汽车电子控制器产业链
数据来源:公开资料整理
结来看,汽车电子控制器(DCU/ECU等)产业链上游在于芯片制造(芯片设计-晶圆生产-封装测试),中游为智能控制器设计制造(SMT贴片,整合无源器件和PCB板),下游是汽车电子终端产品(嵌入式代码)。产业链企业从上至下包括芯片设计方、晶圆制造方、外包封测企业、垂直整合芯片制造商、无源器件、电路板(PCB板)、MCU厂商、域控制器厂商。
域控制器产业链一览
产业链上-中-下游 | 所处行业 | 行业内相关企业 |
芯片制造 | 芯片设计企业 | Skyworks、Broadcom、联发科、展讯、锐迪科、卓胜微等等 |
晶圆制造商 | 台积电、台联电、中芯国际等等 | |
外包封测企业 | 日月光、Amkor、长电科技、华天科技、通富微电等等 | |
智能控制器设计制造 | PCB板 | 鹏鼎、深南电路、沪电股份、景旺电子、世运电路等等 |
无源器件(电阻、电容等) | 村田、三星电机、TDK、国巨、风华高科等等 | |
垂直整合芯片制造商(MCU) | 德州仪器、意法半导体、英伟达、恩智浦等等 | |
汽车电子终端产品 | 域控制器总成商 | 德赛西威、伟世通、大陆、麦格纳、东软睿驰等等 |
数据来源:公开资料整理
上游芯片端——域控制器上游的芯片直接反映了技术应用和产品性能,国内在晶圆代工和封装测试方面都有一定的积累,但在芯片设计方面尚较为空白,而这正是国内外汽车控制器差距所在。
芯片产业链及主要厂商梳理
产业链环节 | 产业链主要细分领域 | 国外主要厂商 | 国内主要厂商 |
芯片设计环节 | 设计软件 | Cadence(美国铿腾电子科技)、MentorGraphics(美国明导国际)、ALTIUM(澳大利亚ALTIUM公司)、Synopsys(美国新思科技)、MagmaDesignAutomation(美国微捷码)、ZUKENINC.(日本图研株式会社)等 | 展讯、华为 |
指令集体系 | 由于处理信息的方式不同,CPU | 指令集分为复杂指令集和简单指令集两种,简 | |
单指令集:英国 | ARM、PowerArchitecture(美国 | IBM)、Mips(美国普思科技公司);复杂指令集:X86(英特尔)- | |
芯片设计 | 博通、高通、英伟达等等 | 中国台湾的联发科,大陆的海思、清华紫光展锐、北京豪威 | |
芯片制造环节 | 制造设备 | 世界半导体制造设备主要供应厂商是AMAT(美国应材)、ASML(荷兰艾司摩尔)、LamResearch(美国科林研发)、LKA-Tencor(美国科磊)、DainipponScreen(日本迪恩仕) | 国产的半导体生产设备厂商以七星华创、北方微电子、中国电科集团等为主 |
晶圆代工 | 全球代工企业主要有台积电、台湾华联电子、美国格罗方德半导体、韩国三星以及中国大陆的中芯国际等公司 | 中芯国际、武汉新芯、上海华力微电子等企业 | |
封装、测试环节 | 封装、测试 | 艾克尔、美国的安靠等 | 台湾地区的日月光集团、矽品,长电科 |
数据来源:公开资料整理
2019年全球前十大IC设计公司营收情况(单位:百万美元)
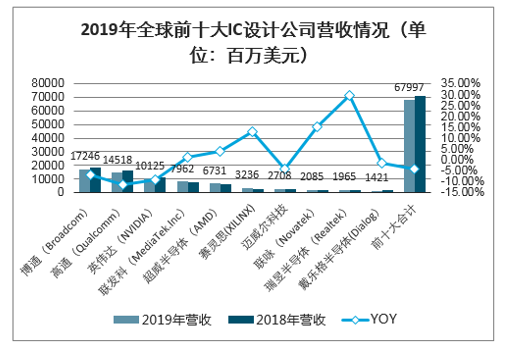
数据来源:公开资料整理
2018年国内前10大IC设计厂商(单位:亿元人民币)
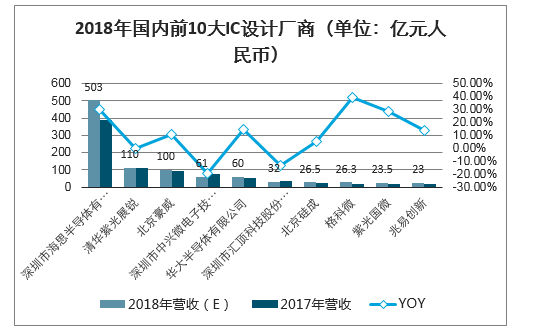
数据来源:公开资料整理
游MCU(微型控制器)端——域控制器中游环节主要是微控制单元(MCU),又称单片微型计算机或单片机,是把CPU(中央处理器)的频率与规格做适当缩减,并将内存、计数器、USB、A/D转换、UART、PLC、DMA等周边接口,甚至LCD驱动电路都整合在单一芯片上,形成芯片级的计算机,为不同的应用场合做不同组合控制。MCU可以视为一个小型的控制器,大多数ECU会基于多个MCU、PCB板进行更为复杂的控制功能设计。
中国汽车电子市场MCU竞争格局
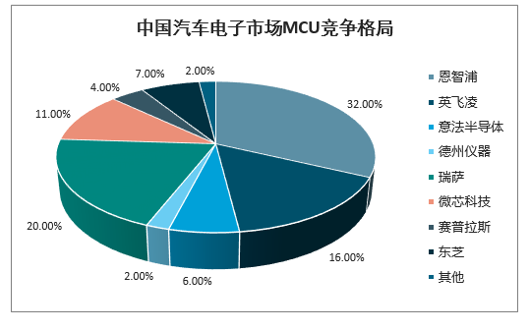
数据来源:公开资料整理
中游PCB端——PCB(印刷电路板)是汽车控制器内部元器件电气连接的载体,主要材料是覆铜板,当前国产化率较高,中国PCB厂商在全球占据重要地位。
全球/国内排名前20的PCB厂商
2018年全球PCB厂商前30排名(单位:百万美元) | 2018中国综合PCB排名(单位:亿元人民币) | |||||
名次 | 公司名称 | 地区 | 2018年营收 | 名次 | 公司名称 | 2018年营业收入 |
1 | 鹏鼎 | 中国台湾 | 3911 | 1 | 鹏鼎控股(深圳)股份有限公司 | 258.55 |
2 | 旗胜 | 日本 | 2856 | 2 | 健鼎(无锡)电子有限公司 | 114.26 |
3 | 迅达 | 美国 | 2847 | 3 | 东山精密制造股份有限公司 | 102.35 |
4 | 欣兴 | 中国台湾 | 2620 | 4 | 深南电路股份有限公司 | 76.02 |
5 | 健鼎 | 中国台湾 | 1727 | 5 | 珠海紫翔电子科技有限公司 | 71.21 |
6 | 华通 | 中国台湾 | 1681 | 6 | 奥特斯(中国)有限公司 | 66.32 |
7 | 三星电机 | 韩国 | 1346 | 7 | 欣兴电子股份有限公司 | 65.81 |
8 | 维信 | 中国大陆 | 1308 | 8 | 沪士电子股份有限公司 | 54.97 |
9 | 奥特斯 | 奥地利 | 1202 | 9 | 深圳市景旺电子股份有限公司 | 49.11 |
10 | 瀚宇博德 | 中国台湾 | 1186 | 10 | 瀚宇博德科技(江阴)有限公司 | 45.95 |
11 | 藤仓 | 日本 | 1155 | 11 | 志超科技股份有限公司 | 42.99 |
12 | 深南电路 | 中国大陆 | 1145 | 12 | 名幸电子有限公司 | 40.78 |
13 | 揖斐电 | 日本 | 1083 | 13 | 华通电脑(惠州)有限公司 | 37.72 |
14 | 名幸 | 日本 | 1074 | 14 | 台郡科技股份有限公司 | 37.1 |
15 | 沪士电子 | 中国台湾 | 999 | 15 | 崇达技术股份有限公司 | 36.56 |
16 | 南亚 | 中国台湾 | 955 | 16 | 深圳市兴森快捷电路科技股份有限公司 | 34.73 |
17 | 住友电工 | 日本 | 945 | 17 | 广东依顿电子科技股份有限公司 | 33.29 |
18 | 信泰 | 韩国 | 917 | 18 | 胜宏科技(惠州)股份有限公司 | 33.04 |
19 | 大德集团 | 韩国 | 900 | 19 | 依利安达集团有限公司 | 31.13 |
20 | 台郡 | 中国台湾 | 884 | 20 | 南亚电路板(昆山)有限公司 | 29.61 |
数据来源:公开资料整理
智研咨询发布的《2020-2026年中国集成电路制造行业竞争现状及投资发展研究报告》显示:车用PCB板是PCB行业的重要应用,2017年中国PCB市场下游应用最多的三个领域分别是通信电子、汽车电子、消费电子,分别占据了35%、16%和15%的应用比例。汽车电动化、智能化、网联化将加速汽车电子化的进程。预测2018至2023年汽车智能化中最重要的ADAS年均成长率为17%。2017年全球汽车电子产值约1950亿美元,每车的汽车电子价值占比预计为30%,到2030年每车的汽车电子价值占比预计增加到50%,汽车电子化程度的不断加深将增加更多的高散热、高多层、高密度PCB的需求。
中国PCB市场下游应用分布
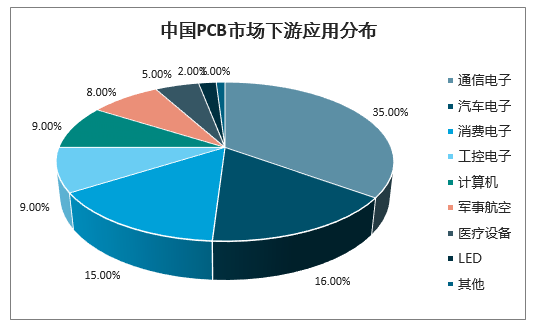
数据来源:公开资料整理
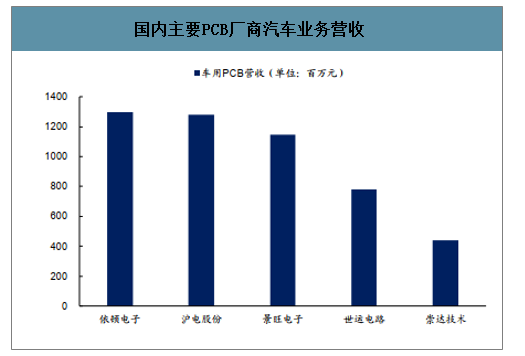
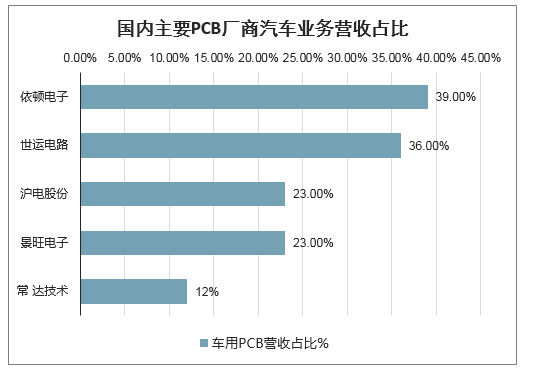
国内PCB核心厂商中,汽车业务比例较高的主要有依顿电子、沪电股份、景旺电子、世运电路和崇达技术,车用PCB业务比例分别达到了39%、36%、23%、23%和12%。
国内主要PCB厂商汽车业务营收
数据来源:公开资料整理
国内主要PCB厂商汽车业务营收占比
数据来源:公开资料整理
下游客户包括了法雷奥、德尔福、博世、大陆、小糸等国际主流TIER1和特斯拉等国际整车企业。
国内主要PCB厂商汽车业务梳理
上市公司 | 车用PCB营收占比 | 车用PCB营收(单位:百万元) | 车用PCB业务下游客户 |
依顿电子 | 39.00% | 1298.16 | 法雷奥、德尔福、博世、大陆等 |
世运电路 | 36.00% | 780.22 | 特斯拉、松下汽车、现代摩比斯、矢崎、安波福(德尔福)等 |
沪电股份 | 23.32% | 1281.71 | 博世、大陆等 |
景旺电子 | 23.00% | 1146.68 | 法雷奥、德尔福、安波福、小糸等 |
崇达技术 | 12.00% | 438.73 | 麦格纳、均胜电子、华阳通用、航盛电路等 |
数据来源:公开资料整理
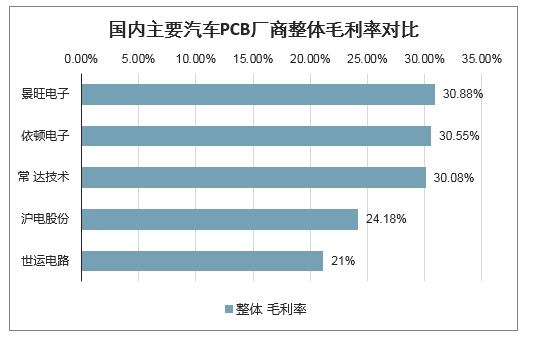
盈利能力来看,景旺电子、依顿电子和崇达技术三家PCB企业相对较为领先,整体毛利率均在30%以上,整体净利率均在15%以上。
国内主要汽车PCB厂商整体毛利率对比
数据来源:公开资料整理
国内主要汽车PCB厂商整体净利率对比

数据来源:公开资料整理
中游无源器件端——无源器件分为RCL和射频元器件两大类,其中RCL约占无源器件的90%,在RCL中,电容、电阻和电感是三种主要类型。电容的主要功能是旁路、去耦、滤波和储能,产值约占无源器件整体的66%;电感的主要功能是滤波、稳流和抗电磁干扰,产值占比约14%;电阻的主要功能是分压、分流、滤波和阻抗匹配,产值占比约9%。
无源器件细分品类占比

数据来源:公开资料整理
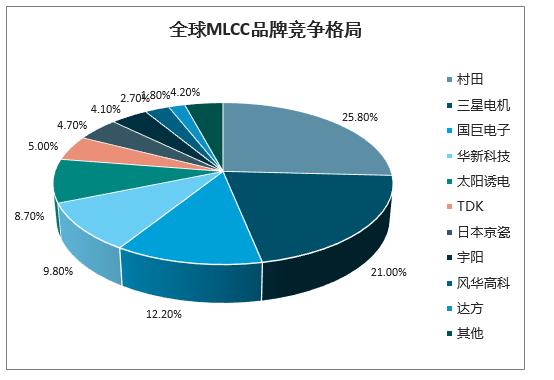
电容器(capacitor)主要包括陶瓷电容、铝电解、钽电解、薄膜电容等,其中陶瓷电容可以做到更小的体积、更大的电压范围,更低廉的价格,在整个电容器领域占比约50%,陶瓷电容器中又以MLCC(片式多层陶瓷电容器)为主导(占比超90%)。MLCC按出货量排名,全球MLCC厂商包括日本村田制作所、韩国三星电机、中国台湾国巨、日本太阳诱电、TDK等;而在中国大陆,MLCC厂商主要有风华高科、火炬电子、三环集团、宇阳及鸿远电子等。
全球MLCC品牌竞争格局
数据来源:公开资料整理
下游域控制器总成端——域控制器总成的领先企业主要包括博世、电装、大陆、TTTech、Aptiv、伟世通等国际TIER1巨头,其中奥地利企业TTTech的自动驾驶域控制器和奥迪A8和上汽进行深度合作,伟世通的座舱域控制器已经在吉利、奔驰等车企进行装配量产;国内以德赛西威为代表的零部件企业在座舱域和自动驾驶域方面近年来也和部分造车新势力企业(车和家、小鹏汽车等)建立了配套关系,其余的域控制器布局企业还有华为、东软睿驰、合众汽车、布谷鸟、百度、环宇智行、知行科技、海高汽车、领目科技等等。
典型座舱域控制器厂商及其方案和客户
域控制器厂商 | 计算平台 | 座舱域控制器名称 | 操作系统/Hypervisor | 座舱域控制器客户 |
伟世通 | 高通 | SmartCore | ANDRID,LINUX | 吉利,戴姆勒奔驰,东风,广汽 |
大陆 | 高通/瑞萨 | 集成式车声电子平台IIP | QNX/PikeOS | - |
博世 | 高通 | AIcarcomputer | AGL | 通用 |
Aptiv | 英特尔 | ICC | LINUX/ACRN | 长城,奥迪,法拉利,沃尔沃 |
德赛西威 | 高通820A德州仪器 | J6 | 智能座舱域控制器 | 车和家 |
布谷鸟 | NXP | Auto | Canbin | 四家主机厂 |
东软睿驰 | 英特尔 | C4-Alfus | LINUX/ACRN | - |
合众汽车 | IntelApolloLake主芯片 | PIVOT智能座舱平台 | - | - |
数据来源:公开资料整理
在自动驾驶域控制器领域,预计未来Tier1与整车厂之间将采取两种合作方式。其一,Tier1负责中间层以及硬件生产,整车厂负责自动驾驶软件部分。Tier1的优势在于以合理的成本将产品生产出来并且加速产品落地,因此整车厂和Tier1进行合作生产方式是必然,前者负责自动驾驶软件部分,后者负责硬件生产、中间层以及芯片方案整合,比如德赛西威IPU03S。
其二,Tier1自己与芯片商合作,做方案整合后研发中央域控制器并向整车厂销售,例如大陆ADCU、采埃孚ProAI、麦格纳MAX4
(2)软件部分,软件算法是汽车电子控制器的另外一个核心。汽车软件系统包括系统软件和应用软件两大部分。系统软件包括操作系统和一系列实用程序,一般由处理器芯片厂家提供。
应用软件包括:数据采集与过程监控模块、数据处理模块、控制算法模块、执行机构控制模块、故障自我诊断模块。
随着汽车智能化的不断提高,软件系统越来越复杂,整个汽车软件代码行数在1000万以上,软件价值占比不断上升,开发成本占汽车电子系统总成本的一半以上,重要性凸显。
域控制器带来的硬件升级和附加软件机遇
汽车电子控制器产业链,从硬件上来看,决定各类控制器功能的核心在于芯片端,域控制器相较于普通ECU而言,在硬件层面:域控制器芯片端发生了1)从原有的16Bit单核处理器升级到多核处理器;2)算力从低到高升级;3)芯片功能从标准到定制芯片(简单到复杂功能)升级。此外还有更多的(传感器)输入接口,更为合理的结构设计、散热与电磁兼容性(EMC)设计。
1)芯片从单核升级到多核处理器
十年前,大多数汽车电子控制单元一般为16Bit单核处理器,一辆汽车上平均MCU个数不足10个,而现在一辆车的MCU超过了100个,高端汽车的MCU甚至达到了300个。MCU数量迅速增长下,会带来很多问题。智能汽车ADAS功能越来越复杂,ECU性能面临瓶颈。
域控制器要想利用其强大的运算处理能力为庞大的汽车软件集中运算提供帮助,就需要用到复杂的多核电控单元。对ECU框架进行优化,根据汽车电子部件功能将整车划分为动力总成,车辆安全,车身电子,智能座舱和智能驾驶等几个域,利用处理能力更强的多核CPU/GPU芯片相对集中的去控制每个域,以取代目前的分布式汽车电子电气架构(EEA)。
表23:单核和多核处理器对比
- | 单核处理器 | 多核处理器 |
内核数 | 一个处理器中只有一个内核 | 一个处理器中集成了多个完整的内核 |
运行线程数 | 能同时运行的线程数较多核更少,不利于同时运行多个程序。 | 能同时运行的线程数较单核更多,有利于同时运行多个程序。 |
执行速度 | 执行速度更慢,容易造成卡顿 | 执行速度更快,不容易造成卡顿,更流畅。 |
数据来源:公开资料整理
2)芯片算力从低到高升级
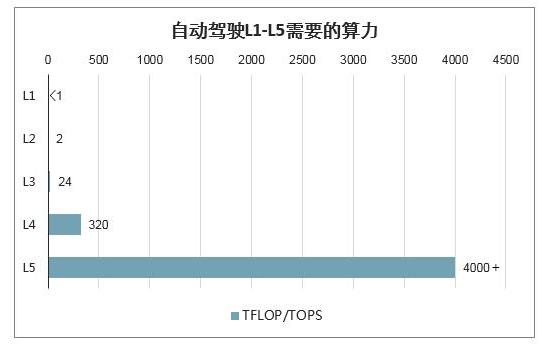
随着汽车智能化的发展,座舱域和智能驾驶域对汽车处理器性能的要求越来越高。根据地平线的数据,自动驾驶等级每提高一级,算力就增加一个数量级;L2级别需要2个TOPS的算力,L3需要24个TOPS的算力,L4为320TOPS,L5为4000+TOPS。
自动驾驶L1-L5需要的算力
数据来源:公开资料整理
3)芯片功能从标准到定制化升级
汽车计算芯片主要包括三种典型产品:ASSP(专用应用标准产品,比如CPU、GPU)、ASIC(专用芯片)和FPGA。当前主流的域控制器处于多核CPU/GPU芯片阶段,随着人工智能计算的快速发展,传统的CPU、GPU已经开始难以满足越来越多新的需求,在能效上也处于劣势。而半定制的FPGA和定制型的ASIC将迎来高速的发展。
第一阶段:从以CPU(通用计算)为核心的ECU转变为以GPU(高性能计算)为核心的智能辅助驾驶芯片。
汽车电子发展的初期阶段,ECU主要是用于控制发动机工作,为保证传感器ECU-控制器回路的稳定性,采用ECU与传感器对应的分布式架构。后来随着车辆的电子化程度逐渐提高,ECU占领了整个汽车,从防抱死制动系统、4轮驱动系统电控自动变速器、主动悬架系统、安全气囊系统,到现在逐渐延伸到了车身各类安全、网络、娱乐、传感控制系统等。
随着汽车电子化的发展,车载传感器数量越来越多,传感器与ECU一一对应使得车辆整体性下降,线路复杂性也急剧增加,此时DCU(域控制器)和MDC(多域控制器)等更强大的中心化架构逐步替代了分布式架构。将整车划分为动力总成,车辆安全,车身电子,智能座舱和智能驾驶等几个域,利用多核CPU/GPU芯片相对集中的去控制每个域。
GPU和CPU最大的区别是设计结构及不同结构形成的不同功能。CPU的逻辑控制功能强,可以进行复杂的逻辑运算,并且延时低,可以高效处理复杂的运算任务。而GPU逻辑控制和缓存较少,使得每单个运算单元执行的逻辑运算复杂程度有限,但并列大量的计算单元,可以同时进行大量较简单的运算任务。此外,CPU的核心数量只有几个(不超过两位数),每个核都有足够大的缓存和足够多的数字和逻辑运算单元,并辅助很多复杂的计算分支。而GPU的运算核心数量则可以多达上百个(流处理器),每个核拥有的缓存大小相对小,数字逻辑运算单元也少而简单。
CPUVSGPU
特征 | CPU | GPU |
ALU(计算运算单元) | 强大的ALU,64bit双精度。执行双精度浮点运算的加法和乘法只需1-3个时钟周期(约1-3纳秒) | GPU的设计出发点在于GPU更适用于计算强度高、多并行的计算,因此拥有大量并行ALU,并且把更多晶体管用于计算单元,因此GPU不适用于繁琐的流程控制和需要大量缓存容量的低延时计算 |
缓存 | 保存大量数据在缓存中,需要访问时直接读取,延时低 | 缓存存在于各线程中并且容量较小,目的是为了提高线程性能,而非降低延时。若有多线程需要访问同一数据,缓存会合并这些访问,再去访问内存(DRAM),会形成延时 |
逻辑控制单元 | 拥有复杂的逻辑控制单元,若程序含有多个分支,通过提供分支预测来降低延时 | 简单逻辑控制单元,没有分支预测和数据预备功能 |
总结 | CPU兼顾计算和控制,70%晶体管用来构建缓存,还有一部分控制单元,用来处理复杂逻辑和提高指令的执行效率。计算通用性强,可以处理高复杂度的计算,延时低,但计算性能一致 | GPU包含大量ALU,以并行方式设计,擅长大规模并发计算。逻辑控制单元简单,缓存较小,适用于破解密码、挖矿及图形计算等场景。 |
数据来源:公开资料整理
第二阶段:从ASSP(专用应用标准产品,CPU/GPU)到FPGA(半定制)、ASIC(定制化)。
摩尔定律使AI芯片性能增加速度越来越饱和,起作用的过程也正在放缓。用于通用计算的CPU和用于高性能计算的GPU在AI计算能效上也开始处于劣势,下一代计算越来越需要异构系统,传统的CPU、GPU已经开始难以满足越来越多的新的需求,半定制的FPGA和定制型的ASIC被各大AI公司青睐。其中ASIC具备体积小、功耗低、计算性能高、计算效率高等优势,大公司如谷歌、阿里也在出芯片,众多创业公司都在做各种各样的ASIC,希望在特定的定制领域提供一些场景和应用。但由于ASIC在很多领域都还没有标准的算法,需要针对特定算法进行设计,不仅不能修改,而且生产周期长达一至两年(18-24个月)。故在全定制的自动驾驶芯片成熟之前,半定制的FPGA是较佳选择。
FPGA的核心优点在于可编程灵活性高、开发周期短,FPGA可随意定制内部逻辑的阵列,并且可以在用户现场进行即时编程,以修改内部的硬件逻辑,从而实现任意逻辑功能。形象点来说,传统的ASIC等于一张出厂时就写有数据且不可擦除的CD,用户只需要放到CD播放器就可以看到起数据或听到音乐;而FPGA是一张出厂时的空白的CD,需要用户自己使用刻录机烧写数据内容到盘里,并且还可以擦除上面的数据,反复刻录。
FPGA和ASIC成本和开发周期对比
―― | 流片一次性成本 | 流片边际成本 | 开发周期 | 流片零界点 |
FPGA | 0 | 10元 | 6-12个月 | 5万片 |
ASIC | 50万 | 0 | 14-24个月 |
数据来源:公开资料整理
在软件层面:域控制器1)形成了多核异构集成平台;2)感知层面融合算法和交叉验证;3)支持更灵活高速的通信网络(CAN叠加以太网);4)新建高级网关;5)Autosar架构;6)安全机制要求更高(ASILD级别);7)支持OTA升级。
域控制器典型的系统技术规格
拓扑结构 | 多核异构 |
计算架构 | 双SoC(FPGAArm)冗余+ASIL-DMCU+ |
功能支持 | AI感知+融合+决策控制 |
算力支持 | 1.2~8Tops |
功耗 | 20~40W |
通讯接口 | CAN、FlexRay、LIN、Ethernet(以太网)等 |
功能安全目标 | ASIL-D |
OTA | 支持 |
数据来源:公开资料整理
1)各软件组件的集成平台:基于复杂接口、更高算力和多核处理器芯片,域控制器建立了一个集成平台,兼AI感知、融合、决策控制一体化平台型架构,灵活支持客户定制化的系统配置、传感器组合、通讯接口与协议等
2)多传感器融合算法:感知层面采用多冗余与交叉验证机制,保证目标检出可信度;决策层面采用先进状态估计与判断算法,准确判断动态场景,在边缘处理器侧即可实现原始数据层面的高效融合与处理。
自动驾驶域控制器典型的传感器通道
视觉 | 8+通道(前3侧4后1) |
环视 | 4通道 |
毫米波雷达 | 6通道(前/后/角4) |
激光雷达 | 2~4通道(前后~角4) |
超声 | 12通道 |
GPS+IMU | 支持差分分米级定位 |
HDmap | 支持 |
帧率 | 视觉:10~60fps;毫米波Lidar:10fps |
数据来源:公开资料整理
3)车内通信网络及网关升级:当前CAN,LIN代表着传统汽车车内通信网络,但CAN最大1MB/s的带宽以及非确定性的Message传输时间,在高算力和高度融合的域控制器阶段有所不足,未来更高速、更开放的以太网有望取代CAN成为骨干网络,和CAN等传统车载网络在较长的一段时间内共存。也就是说,①在车身控制域内部,各部件通过CAN、LIN沟通实现数据共享(类似于传统车载网络架构);②在娱乐子网中,娱乐域控制器与其子部件的通信将通过以太网实现;③当一个域需要与其他域交换信息时则经由网关、以太网路由实现。
车载通信网络升级趋势
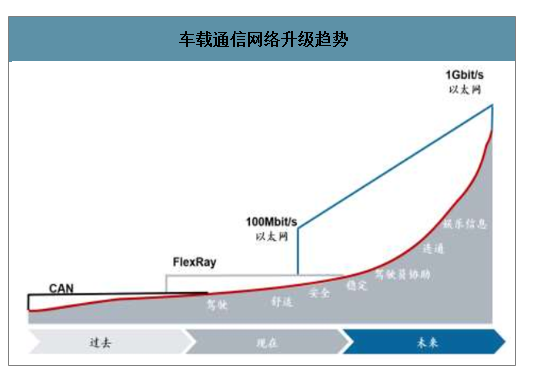
数据来源:公开资料整理
常见的车载通信网络优劣势对比
常见的车载通信网络 | 应用领域 | 优点 | 缺点 | 最高带宽 |
CAN | 实时控制 | 成本低、可靠性高 | 带宽低、共享介质 | 1Mbit/s |
LIN | 低带宽控制 | 成本更低 | 带宽低、共享介质 | 19.2Kbit/s |
FlexRay | 实时控制 | 带宽高 | 成本高、共享介质 | 2*10Mbit/s |
Most | 娱乐系统 | 带宽高 | 成本高、有限个摄像头 | 150Mbit/s |
LVDS | 驾驶辅助摄像头 | 带宽高、成本低 | 仅一个摄像头、视频设备 | 655Mbit/s |
以太网 | 背板、摄像头、雷达、信息娱乐系统 | 带宽高 | 网络问题 | 100Mbp |
数据来源:公开资料整理
4)AUTOSAR标准软件架构:AUTOSAR是全球各大汽车整车厂、汽车零部件供应商、汽车电子软件系统公司联合拟定的一个符合汽车电子软件开发的、开放的以及标准化的软件架构。该架构旨在改善汽车电子系统软件的更新与交换,同时更方便有效地管理日趋复杂的汽车电子软件系统。AUTOSAR规范的运用使得不同结构的电子控制单元的接口特征标准化,应用软件具备更好的可扩展性以及可移植性,能够实现对现有软件的重用,大大降低了重复性工作,缩短开发周期。
5)系统安全升级:ISO26262是汽车电气/电子系统相关的“功能安全”国际标准,于2011年11月正式发布第一版本,于2018年12月发布修订后的第二版。
ISO26262采用车辆安全完整性等级(ASIL)来判断系统的功能安全程度,ASIL由ASILA(最低)、ASILB、ASILC及ASILD(最高)四个等级组成,ASIL等级越高表示系统的功能安全评估越严格,相应的表示系统正确执行安全功能,或者说的避免该功能出错的概率越高,即系统的安全可靠性越高。域控制器作为范围内核心计算平台,牵一发而制全身,功能安全要求更高,功能安全目标多数在ASILD等级(最高安全等级)。
6)更为高效的OTA升级:模块越少、系统越统一越容易实现整车OTA,域控制器更为集中的EEA架构将车内各个分散的ECU部件的控制功能集成在一个DCU中,仅对DCU进行控制功能进行更新升级完成OTA,同时规避了各ECU的不同传输协议和兼容性风险,减少了每个ECU进行安全性确认防篡改的工作量。
特斯拉作为车辆OTA升级的鼻祖,一定程度上就是得益于其DCU组件的电子电气架构。
三、域控制器的未来发展
随着车载传感器数量越来越多,传感器与ECU一一对应使得车辆整体性能下降,线路复杂性也急剧增加,DCU(域控制器)和MDC(多域控制器)等更强大的中心化架构将逐步替代了分布式架构。
在域控制器发展趋势上,Vector将汽车电子电气架构发展分为三个阶段:以控制器为中心的阶段、域控制器阶段、中央计算机阶段。最终,智能汽车将将成为一部移动的超级计算机兼数据中心,并将诞生新的Wintel。未来高级自动驾驶汽车时代的核心技术将是计算平台、操作系统和应用软件,同时,多媒体多域控制器则有可能和中央域控制器合二为一。
汽车电子电气架构未来发展趋势:SOA构驾的超级中央计算机

数据来源:公开资料整理
从汽车发展历史上看,汽车电子已经成为汽车控制系统中最为重要的支撑基础。2016年汽车电子市场规模2716亿元,2018年汽车电子市场规模超6000亿元。随着新能源车、无人驾驶、车载信息系统技术日渐成熟,未来汽车产业将沿着智能化、网络化以及深度电子化方向发展。当前汽车电子已经进入新一轮技术革新周期,汽车电子渗透率及单车价值量都将会得到大幅提升,预计2020年中国汽车电子市场规模有望逼近9000亿元。
2012-2020年中国汽车电子市场规模走势预测
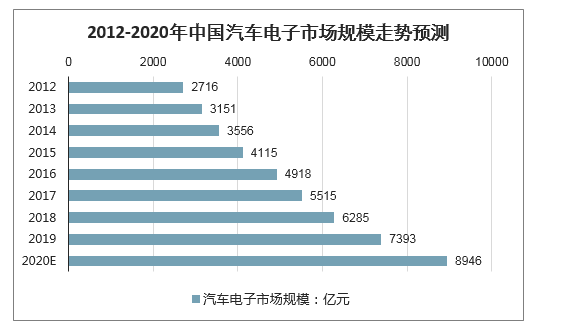
数据来源:公开资料整理
域控制器是车辆OTA升级的基石OTA技术从PC/手机延伸到汽车。OTA英文全称Over-the-AirTechnology,亦即“空中传输技术”或“远程升级”,是指通过服务器、移动通信网络和终端等的网络连接,最终实现终端内存储数据的更新,进而改善终端的功能和服务的技术。
OTA技术最早应用在PC机上,后来广泛应用在移动手机行业,与PC、移动手机在短短二三十年广泛应用OTA技术不同,汽车行业由于其复杂的分布式电子电气架构(ECU)及安全考量的原因,并没有很快接受这项新技术,近几年随着电子电气架构的升级(DCU)才逐渐在汽车行业里普及。
当前汽车OTA又分为SOTA和FOTA两种升级方式。早期的汽车OTA自TBOX开始,通过内置SIM卡的TBOX为车主用户提供如道路救援、车厂客服、110紧急通话、远程车况查询、远程控制车门、车窗和空调开关等网络服务。随后一些车企开始针对IVI(车载信息娱乐系统)如导航地图、音乐等升级进行OTA升级。这都是汽车OTA的早期应用,针对应用程序等软件的升级。发展到现阶段,汽车OTA已经不仅仅满足于软件升级,固件升级成为汽车OTA升级的一大趋势。
SOTA(SoftwareOTA)又称软件升级,是指那些离用户更近的应用程序(App)、车载地图、人机交互界面等功能。
FOTA(FirmwareOTA)又称固件更新,用户可以通过特定的刷新程序进行FOTA升级,影响的是动力系统、电池管理系统等。FOTA可以深层次改变汽车控制系统、管理系统及性能表现,甚至还能通过预留的硬件,通过后期的OTA开放一些新功能。
特斯拉依靠其集中式电子电气结构率先实现整车OTA升级。特斯拉是整车OTA升级的开创企业,它不仅可以通过OTA将软件升级发送到车辆内的车载通讯(telematics)单元,更新车载信息娱乐系统内的地图和应用程序以及其他软件,还可以直接将软件增补程序传送至有关的电子控制单元(ECU),以实现安全、可靠的固件功能升级。具体思路就是,在汽车上预先搭载可能多年都不会使用的硬件,随着法规、测试数据和算法的逐渐完善,再逐渐更新软件来一步步解锁新功能已达到最终的无人驾驶。特斯拉之所以成为整车OTA升级的先行者,核心得益于其超前的汽车电子电气架构,传统车企分布式电子电气架构中ECU数量庞大,单个ECURAM内存容量有限,同时供应商的底层代码和嵌入软件各异,难以完成整车功能的统一更新。而特斯拉采用集中式的电子电气架构,2015款的ModelS大约有15个ECU,此后发布的Model3则直接通过Hardware3.0和三个车身控制器执行来控制行驶、转向和停止等功能,集中的架构和高算力的控制模块支撑了特斯拉整车OTA升级。目前特斯拉已经可以通过OTA的方式实现改善车辆的底盘、信息娱乐、电池续航、ADAS乃至自动驾驶等多项功能,让车的功能迭代更加灵活和便捷,最终变成一台可以不断进化的智能终端。
特斯拉历史上几次较有影响力的OTA升级
升级时间 | 升级车型 | 升级原因 | 升级内容 |
2015年10月 | ModelS | 自动驾驶概念刚刚流行 | 新增自动转向、自动紧急转向&侧面碰撞预警、自动变道和自动泊车等四项自动驾驶功能 |
2018年6月 | Model3 | 媒体测试 | 将刹车距离缩短20英尺 |
2018年9月 | 中国华南地区注册的装配60kwh电池组的所有特斯拉车型 | 飓风山竹来临 | 暂时使用户获得更多的电池容量 |
2019年10月 | ModelS | 媒体测试 | 电机最大功率提升50匹马力 |
数据来源:公开资料整理
传统车企开始发力布局OTA技术。特斯拉之后,全球传统龙头车企也纷纷致力于改进自身电子电气架构,选择优质域控制器供应商合作,发力布局OTA升级。近年来国内各造车新势力在特斯拉领路下,叠加自身不同于传统制造业的互联网思维,相较于传统车企,造车新势力们在汽车OTA升级方面也呈现出“后来居上”的态势。
传统车企和造车新势力开始发力布局OTA技术
时间 | 车企 | OTA内容 |
2016年11月 | 丰田 | 宣布采用以无线通信方式更新ECU的OTA软件服务,第一时间修正车辆控制单元存在的漏洞,同时还可以通过OTA服务提供新功能。 |
2017年1月 | 大众 | 使用OTA技术创造“功能化需求”,通过订阅或者试用等方式向消费者提供试用商品,比如基于软件升级的导航和其他连接服务,以让消费者决定是否要针为车辆的新功能投入更多金钱。 |
2017年5月 | 福特 | 采用OTA技术进行软件升级,为搭载Sync3的2016款车辆新增AndroidAuto及AppleCarPlay系统。 |
2017年7月 | 沃尔沃 | 地图服务商HERE与沃尔沃签订长期合作协议,为部分被选定的沃尔沃车主提供通过OTA实现的车载地图升级服务。这项服务涵盖的车型包括沃尔沃XC90、S90、V90CrossCountry及新款XC60。 |
2017年12月 | 上汽集团 | 上汽集团启动了号称史上全球最大规模的OTA升级,包括荣威RX5、RX3、i6和MG旗下多款车型共40万辆汽车陆续完成升级,将搭载的包括导航、AI语音控制、出行娱乐等功能在内的「斑马智行」解决方案升级至2.0版本。 |
2019年3月 | 电装、丰田汽车、丰田通商 | 电装与丰田汽车、丰田通商共同对Airbiquity进行投资1500万美元,进一步加强OTA系统的研发。 |
2019年11月 | 福特 | 福特再次宣布一项计划,准备在2020年的大部分新车上增加OTA的更新能力,升级范围“将是从前保险杠到后保险杠的更新”,可以和汽车计算机模块一起工作,控制汽车上的大部分内容。 |
2020年2月 | 蔚来 | 蔚来升级的项目分为三大部分,智能互联部分包括新增远程方向盘/座椅加热、新增电池智能预热开关、新增车内照片分享;NIOPilot自动辅助驾驶部分包含增自动紧急制动-带行人及自行车识别、新增超车辅助、动态仪表界面优化、其它优化;数字座舱部分包括新增智能场景推荐、新增加电助手、NOMI体验优化。 |
2020年3月2日 | 小鹏汽车 | 小鹏汽车正式向G3用户分批推送XmartOS1.7.1版本OTA升级软件。升级完成后的小鹏G3全系将新增可进行车舱内净化的“高温抑菌”功能。 |
2020年2-4月 | 理想ONE | 在2020年2月末、3月末、4月末,理想ONE每月将进行一次OTA升级,理想ONE也将具备全新的功能和更强的性能。理想ONE整个春季的OTA提升项目为:新的能源模式-纯电优先和燃油优先、增加新的特殊路况模式、仪表屏显示息的界面更清晰直接、新增车载微信、优化时间的显示方式、整车上下电逻辑优化、新增蓝牙连接功能并提升使用感受、充电功能优化、驾驶辅助系统优化、车控App连接速度提升开放新功能、座椅功能优化、行车记录仪优化。 |
数据来源:公开资料整理
域控制器未来走向中央控制器时代
终极阶段——车辆集中式电子电气架构。如博世的经典六段图所示,以域控制器为代表产品的【跨】域集中式电子电气架构再往后走,就是集成化程度更高的车辆集中式电子电气架构——Vehiclecomputerandzoneconcept(车载电脑),终极阶段就是Vehiclecloudcomputing(车云计算),形象来看就是从春秋五霸走向大一统的中央集权制。未来车辆通过用高性能的中央计算单元取代现在常用的分布式计算的架构,将实现“软件定义车辆”的终极目标。
车辆电子电气架构向集中计算平台升级
数据来源:公开资料整理
中央控制器更具空间、轻量化、可扩展性优势。相较于域控制器时代的Domaincentralized电子电气架构,基于新一代Central&Zone电子电气架构的汽车设计,能通过ECU集成进一步降低成本,较域控制器更具空间优势、轻量化、车型覆盖多、可扩展性特点,其目标是设计简单的软件插件和实现物理层变化的本地化。
基于域和基于Central&Zone架构的对比
- | 基于域的现有架构 | 新一代Central&Zone架构 |
动力 | 需要专用附加线路 | 可最大限度地减少区域线路 |
网络 | 需要专用附加线路;需要协商网络设计 | 可最大限度地减少区域线路;局部变化,比如通讯矩阵 |
安装 | 需要为附加ECU进行重新设计 | 为附加ECU留出空间 |
逻辑 | 需要更改分布式ECU的软件 | 只需更改中央ECU的软件 |
数据来源:公开资料整理
特斯拉最新款的Model3结构就是车辆集中式电子电气架构(Central&ZoneConcept)的典型代表,也是该架构下的第一款量产车型。Model3全车主要有三大控制模块构成,一个是类中央控制模块的自动驾驶及娱乐控制模块Autopilot&InfotainmentControlModule,另外两个分别是右车身控制器BCMRH和左车身控制器BCMLH。
宝马和奥迪也进行中央计算平台的电子电气架构设计。除特斯拉以外,宝马与奥迪也都在进行全新的电子架构设计,命名略有不同,奥迪将新架构命名为中央计算集群(centralcomputingcluster),而宝马叫做中央计算平台(centralcomputingplatform)。在宝马的体系结构中,中央计算平台(图38的顶层,第1类)划分主要的软件功能,这些功能主要在内部开发。这些平台提供高性能,并满足最高的安全要求。集成ECU(第2类)填充了中央计算平台和普通ECU(第3类)之间的差距——例如,部署需要直接访问传感器或执行器的时间关键功能。对于简单和非特定于OEM的功能,可以接受普通ECU和传感器和执行器(第4类)。理想情况下,这些ECU、传感器和执行器基于常见的OEM或者一级供应商的零件。
车载中央计算平台有望最后走向车云计算。车内E/E架构和云端架构越来越接近。云端为各种应用程序提供了基础(自动驾驶和多媒体功能可以在云端执行),可以通过云端为司机提供移动服务。可以对从汽车传输到云端的信息进行分析。车内和云端架构的无缝结合,将成为使E/E基础设施能够处理即将到来的创新的重要一步。
 智研咨询 - 精品报告
智研咨询 - 精品报告

2024-2030年中国智能驾驶域控制器行业市场现状调查及投资前景研判报告
《2024-2030年中国智能驾驶域控制器行业市场现状调查及投资前景研判报告》共十二章,包含中国智能驾驶域控制器行业重点企业推荐,中国智能驾驶域控制器行业发展前景与市场空间测算,2024-2030年中国智能驾驶域控制器行业的投资机会与建议等内容。















 公众号
公众号
 小程序
小程序
 微信咨询
微信咨询
![2025年中国塑料吹膜机行业市场政策、产业链、发展现状、竞争格局及发展趋势:市场竞争较为激烈[图]](http://img.chyxx.com/images/2022/0330/b388a599ab8b82a70e79838a8b0d600efa11727f.png?x-oss-process=style/w320)
![2025年中国串番茄行业市场政策、产业链、发展现状、竞争格局及发展趋势研判:鲜食消费占比最大[图]](http://img.chyxx.com/images/2022/0408/54b870b64f647f1fc10474b02796382c9242dcfa.png?x-oss-process=style/w320)
![2025年中国数字化智能控制系统及设备行业发展现状、产业链结构及未来趋势研判:行业应用领域广泛,市场规模不断提升[图]](http://img.chyxx.com/images/2022/0330/d1363a7ee3953fc25ed09e0b79158acce9dc7c22.png?x-oss-process=style/w320)
![研判2025!中国网民网络视频行业产业链、市场规模及重点平台分析:网络视频行业市场规模持续攀升,内容多元化到技术赋能全面重塑视听生态[图]](http://img.chyxx.com/images/2022/0408/55d853aceb464ffcf6fad7c27bbd7795797b1b5a.png?x-oss-process=style/w320)
![研判2025!中国管道检测工程行业发展历程、市场规模及发展趋势分析:行业市场规模持续增长,技术创新推动智能化升级[图]](http://img.chyxx.com/images/2022/0330/ce25a2275c336b52d58303ed80fb7924b3fd1022.png?x-oss-process=style/w320)